Acoustic backscatter from krill and silverfish in McMurdo Sound from 2014-2015
Project
| Contributors | Affiliation | Role |
|---|---|---|
| Daly, Kendra L. | University of South Florida (USF) | Principal Investigator |
| Ainley, David G. | H.T. Harvey & Associates | Co-Principal Investigator |
| Ballard, Grant | Point Blue Conservation Science | Co-Principal Investigator |
| Kim, Stacy | Moss Landing Marine Laboratories (MLML) | Co-Principal Investigator |
| Saenz, Benjamin | University of South Florida (USF) | Contact |
| Biddle, Mathew | Woods Hole Oceanographic Institution (WHOI BCO-DMO) | BCO-DMO Data Manager |
Krill and fish were sampled acoustically and visually beneath the fast ice using the tethered SCINI ROV, which was deployed and operated through a 25 cm diameter hole drilled through the sea ice. SCINI contained cameras and thrusters, and towed a sensor package consisting of a WET Labs fluorometer (ECO-AFL/FL) and a single-beam Biosonics 120 kHz DT-X echosounder. Visual targets were identified to the lowest taxon possible; these observations were used primarily to verify classification of acoustic signals. The echosounder operated at a nominal ping rate of 1 ping s-1; however, this rate was occasionally adjusted if false bottom signals were observed. The general profile of a dive included a surface transect of ~300 m horizontal distance, where the acoustic transducer faced downward, and also a dive to ~120 m if conditions allowed. Echogram data were saved to a depth of 500 m, and background noise was removed. Given the effective range of the transducer of approximately 100 m (resolving -80 dB targets), surveys characterized the upper 200 m of the water column.
Raw acoustic data were analyzed using Echoview software (version 5.3). All acoustic aggregations greater than 4 pings in width were manually delineated, and acoustic energy of the aggregations was integrated into bins of six seconds wide by 1 m in depth. These aggregations were classified as potentially krill or silverfish, based upon ROV visual identification of the targets, or where no visual targets were encountered, by comparing the aggregation target strength, shape, density, and texture and depth to a set of aggregations with positive visual classification. Acoustic returns are presented as integrated acoustic energy (volume backscatter strength [sv], in units of m-1) and samples are grouped into depth bins of 10 m. Zero data is also reported, to allow estimation of density parameters.
BCO-DMO Processing Notes:
* added conventional header with dataset name, PI name, version date
* modified parameter names to conform with BCO-DMO naming conventions
* sorted the data by sitenumber
| File |
|---|
Backscatter.csv (Comma Separated Values (.csv), 313.11 MB) MD5:60ce6f5f0eeaf9c329933873e6df8f4c Primary data file for dataset ID 715715 |
| Parameter | Description | Units |
| sitenum | site number | unitless |
| bin_depth | bottom depth of bin of sample | meters (m) |
| depth | mid depth of bin of sample | meters (m) |
| sv_mean | mean volume backscatter | per meter (m-1) |
| group | group | unitless |
| Dataset-specific Instrument Name | Biosonics, Inc. DT-X echosounder |
| Generic Instrument Name | BioSonics DT-X Digital Scientific Echosounder |
| Dataset-specific Description | Biosonics, Inc. DT-X echosounder with 120 kHz split beam transducer |
| Generic Instrument Description | The BioSonics DT-X Digital Scientific Echosounder is available in single or spilt beam configuration. The resultant data set comprises 38 and 120 kHz split beam data. The DT-X Digital Scientific Echosounder is used for stock assessment, biomass estimates, and habitat mapping. DT-X digital transducers are available in a range of frequencies (38, 70, 120, 200, and 420 kHz) and beam patterns in split beam or single beam. Up to 5 transducers can be mulltiplexed for simultaneous data collection in any combination of frequencies and transducer orientations. The BioSonics split beam echosounder data can be analyzed for fish quantity, individual sizes, direction of travel through the acoustic beam. Data analysis is done using BioSonics, Echoview, or Sonar4/5-Pro software (and other options are available). Additional information is available from: BioSonics DT-X Digital Echosounder (http://www.biosonicsinc.com/product-overview.asp), BioSonics (http://www.biosonicsinc.com), Echoview (http://www.echoview.com/), and Sonar4/5-Pro (http://tid.uio.no/~hbalk/sonar4_5/index.htm). |
| Dataset-specific Instrument Name | SCINI ROV |
| Generic Instrument Name | Remotely Operated Vehicle |
| Dataset-specific Description | SCINI ROV (https://bitbucket.org/scinirov/scini/wiki/Home) |
| Generic Instrument Description | Remotely operated underwater vehicles (ROVs) are unoccupied, highly maneuverable underwater robots operated by a person aboard a surface vessel. They are linked to the ship by a group of cables that carry electrical signals back and forth between the operator and the vehicle. Most are equipped with at least a video camera and lights. Additional equipment is commonly added to expand the vehicle’s capabilities. These may include a still camera, a manipulator or cutting arm, water samplers, and instruments that measure water clarity, light penetration, and temperature. |
McMurdo_Backscatter_2014-2015
| Website | |
| Platform | shoreside McMurdo_Backscatter |
| Start Date | 2014-11-23 |
| End Date | 2015-01-07 |
Food web dynamics in an intact ecosystem: the role of top predators in McMurdo Sound (McMurdo Predator Prey)
Extracted from the NSF award abstract:
The research project investigates the importance of top down forcing on pelagic food webs. The relatively pristine Ross Sea includes large populations of upper-level predators such as minke and killer whales, Adélie and Emperor penguins, and Antarctic toothfish. This project focuses on food web interactions of Adélie penguins, minke whales, and the fish-eating Ross Sea killer whales, all of which exert foraging pressure on their main prey, crystal krill (Euphausia cyrstallorophias) and silver fish (Pleuragramma antarcticum) in McMurdo Sound.
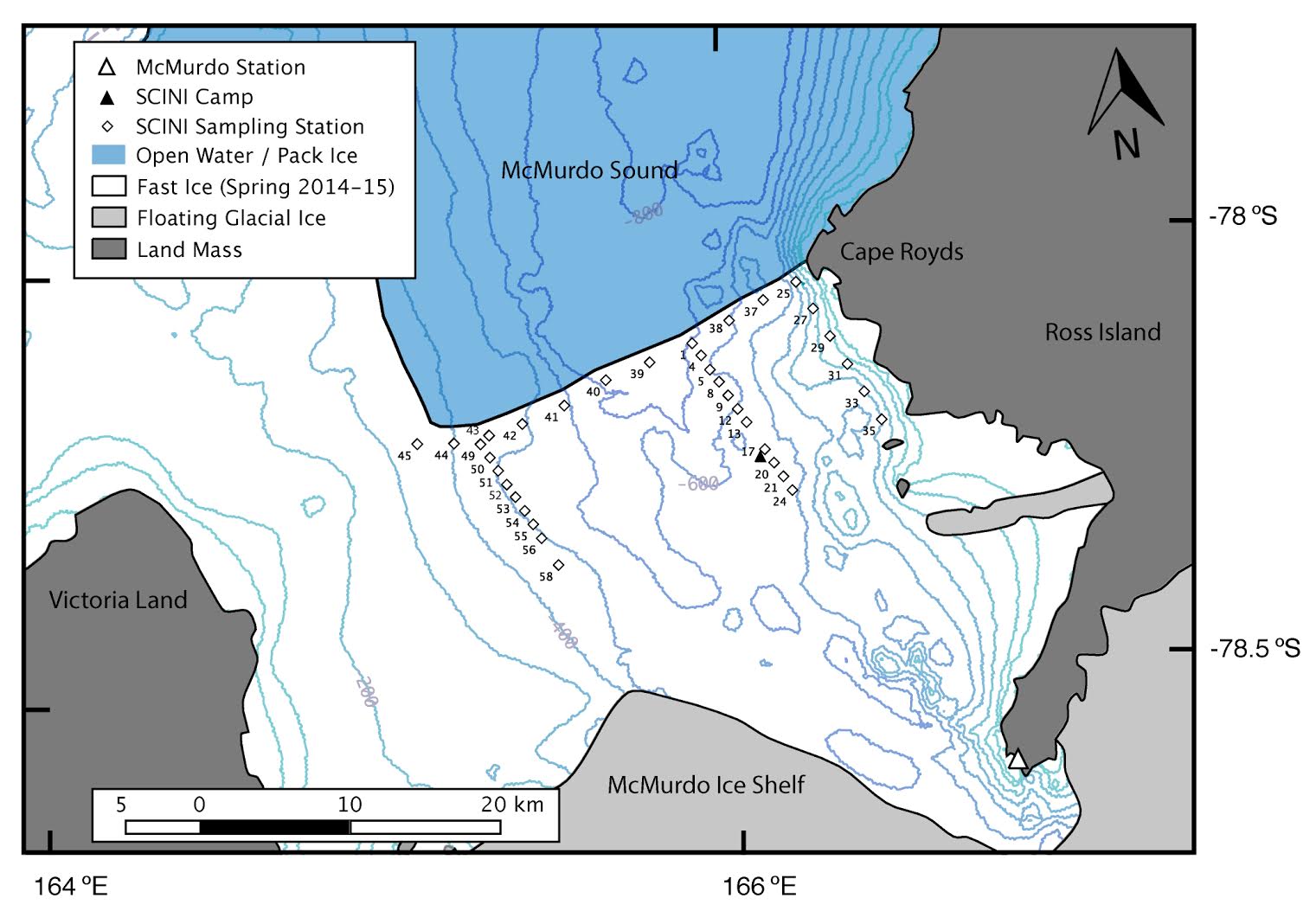
The investigators used a video- and acoustic-capable ROV, and standard biological and environmental sensors to quantify the abundance and distribution of phytoplankton, sea ice biota, prey, and relevant habitat data. The sampling area included 37 stations across an 30 x 15 km section of McMurdo Sound, stratified by distance from the ice edge as a proxy for air-breathing predator access. This study will be among the first to assess top-down forcing in the Ross Sea ecosystem and will form the basis for multidisciplinary studies in the future.
Map sampling stations
| Funding Source | Award |
|---|---|
| NSF Division of Polar Programs (NSF PLR) | |
| NSF Division of Polar Programs (NSF PLR) | |
| NSF Division of Polar Programs (NSF PLR) |
[ table of contents | back to top ]