Along-stream velocity, cross-stream velocity, and estimated pressure gradient at station E located at an oyster reef in Wassaw Sound, Georgia in November of 2014 (SensoryNCE project)
Project
| Contributors | Affiliation | Role |
|---|---|---|
| Weissburg, Marc | Georgia Institute of Technology (GA Tech) | Principal Investigator |
| Kubanek, Julia | Georgia Institute of Technology (GA Tech) | Co-Principal Investigator |
| Webster, Donald | Georgia Institute of Technology (GA Tech) | Co-Principal Investigator, Contact |
| York, Amber D. | Woods Hole Oceanographic Institution (WHOI BCO-DMO) | BCO-DMO Data Manager |
This dataset along-stream velocity, cross-stream velocity, and estimated pressure gradient at station E located at an oyster reef in Wassaw Sound, Georgia from November 3rd to 6th, 2014.
These data were published in Young et al., 2016 (see Fig. 7 and Fig. 8)
In addition to the "Get data" button above which provides various options to download the data in ASCII format, the originally submitted data is available in MATLAB .mat format (RotAvg30secADV07.mat, 27 KB)
The equipment used was an Acoustic Doppler Velocimeter (ADV, Nortek Vector – Nortek AS, Rud, Norway). ADVs measure the fluid velocity at essentially a point in the flow. The ADV measurements have a resolution of 1 mm/s and were collected continuously at 1 Hz.
Pressure Transducer - The equipment used is an Onset HOBO pressure transducers (PTs). The PTs measured absolute pressure and temperature every 30 sec. The PTs were housed in custom-made PVC stands. The stand’s aluminum plate prevented instrument settling during the deployment cycle and the bolt/dive-weight assembly fixed the vertical elevation of the PTs within the stand. The three PTs were surveyed daily with static GPS for at least two hours. Additionally, a GPS base station, located on the nearby fixed dock, was surveyed daily for at least eight hours to improve GPS vertical elevation accuracy during post-processing. The GPS antennae were Ashtech Duel Frequency Marine Antenna (Ashtech S.A.S., Carquefou, France) that were connected to either Ashtech ProFlex 500 GS or Z-Surveyor receivers and were programmed to record internally at 10 sec intervals. The water salinity was measured near the surface from the dock (Fig. 1) at 4:15 PM on November 3rd, 2014 and 11:35 AM on November 6th, 2014 and was 25.7 and 26.3, respectively.
Sampling Location Map:
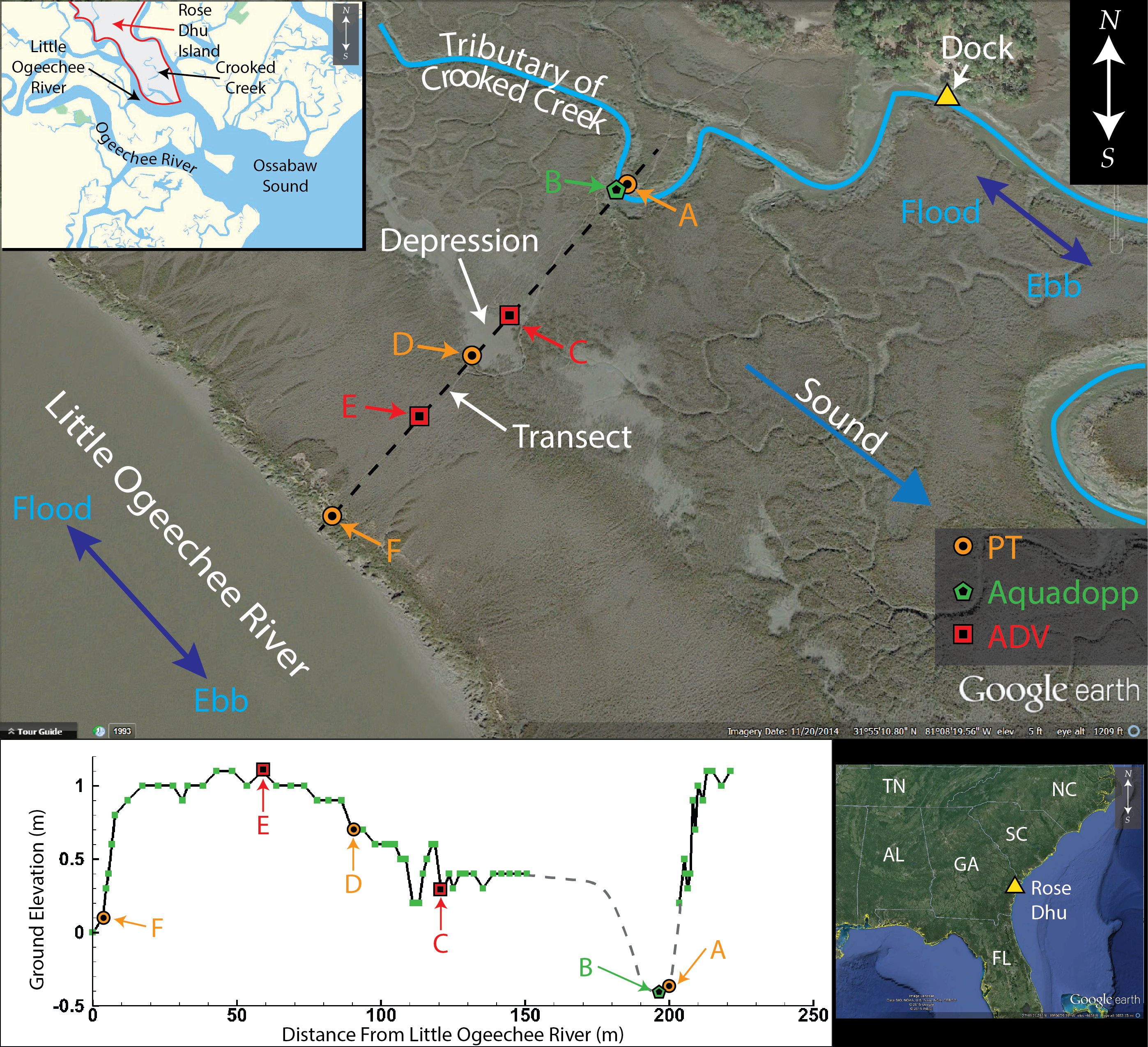
Image courtesy of David Young
ADV - Data collected during low tide (determined by instances of the PT at station D being dry) were discarded. Following the recommendations of Chanson et al. (2008) and Wilson et al. (2013), data for which the average correlation coefficient of the three beams was less than 70% for 45 consecutive samples, or for which the average over 300 samples of the mean correlation coefficient of the three beams dropped below 70%, were discarded. This filtering predominately removed data collected while the instrument was not submerged, and less than 2% of the submerged instrument data were removed due to filtering. The dominant flow direction (if one was present) was determined for each ADV. An ellipse was fit to a scatter plot of the measured east and north velocity components for each ADV, and the major axis of the resulting ellipse is defined as the “along-stream” flow direction. Correspondingly, the minor axis is defined as the “cross-stream” direction.
Pressure Transducer - To convert the absolute pressure to gauge pressure, atmospheric pressure readings from the nearby (~ 13 km away) weather station at Skidaway Institute of Oceanography were employed. Gauge pressure was converted to water depth above the PT by assuming the pressure variation in the vertical direction was solely due to hydrostatic effects. The water density was determined from the PT temperature measurement and the salinity measured at the dock, which was assumed to be equal to the salinity in the vicinity of the PTs. Temperature and salinity were assumed to be vertically homogeneous. To improve the accuracy of the absolute pressure readings (and thus the estimated water surface elevation), the three PTs were calibrated in a 1 m deep tank at seven temperatures, ranging from 12 to 26 °C. Linear calibration curves were developed to calculate the pressure difference between two of the PTs (stations A and D) and the third reference PT (station F) as a function of temperature. These curves were used during data processing to adjust the pressure data to a common reference pressure. The standard deviations of the mean pressure difference between the PTs at stations A and D and the reference PT at station F were calculated for each calibration temperature. The difference was found to be less than 1o Pa in all cases, which corresponded to less than 1 mm of water surface elevation difference. The water surface elevation was calculated relative to the NAVD88 vertical datum by adding the water depth data to the PT elevation using the dimensions of the stand and the GPS measurement of the antenna position. To arrive at sufficiently accurate water surface elevation measurements, the GPS measurements were post-processed using GrafNet (NovAtel, Calgary, Alberta, Canada), treating the GPS system as a stationary closed loop network. The system included four GPS antenna/receivers (one at each PT and one on the dock) and several Continuously Operating Reference Stations (CORS) operated by the U.S. National Geodetic Survey (NGS). The estimated vertical accuracy from GrafNet was approximately 0.5 cm for all stations. This level of accuracy was obtained using simultaneous GPS measurements. The vertical positions of the PT stands did not vary during the experimental periods. The pressure gradient at Station E is the water surface elevation differential between the PT at station D and the PT at station F divided by the distance between station. Positive pressure gradient is defined as higher water level in the high marsh (PT at station D) than in the Little Ogeechee River (PT at station F)
BCO-DMO Data Manager Processing Notes:
* added a conventional header with dataset name, PI name, version date
* data extracted from MATLAB .mat files to ASCII flat files to serve in the BCO-DMO system
* modified parameter names to conform with BCO-DMO naming conventions
* added approximate lat and lon of sampling location to data
* Time format changed from matlab datenum to Date and Time (yyyy-mm-dd,HH:MM:SS)
* Data version 2 (2018-07-12) replaces data version 1 (2017-07-20) - improved metadata, added timestamp in UTC in addition to local date/time
| File |
|---|
ADV_E_Rot.csv (Comma Separated Values (.csv), 75.78 KB) MD5:4c2bfa1e3a77186584a5326569a5953c Primary data file for dataset ID 720637 |
| Parameter | Description | Units |
| date | Date (local EST) in format yyyy-mm-dd | unitless |
| time | Time (local EST) in format HH:MM:SS | unitless |
| streamwise_velocity | Stream-wise velocity | centimeters per second (cm/s) |
| crosswise_velocity | Cross-wise velocity | centimeters per second (cm/s) |
| upward_velocity | Upward velocity | centimeters per second (cm/s) |
| water_level | Water level from the ADV at station C (ADV07). This is assumed to be equal to water level at the pressure transducer at station D (PT-D). | meters |
| pressure_gradient | pressure gradient (meters of drop in water level per meter of horizontal distance). | dimensionless |
| lat_approx | Approximate latitude | decimal degrees |
| lon_approx | Approximate longitude | decimal degrees |
| ISO_DateTime_UTC | Timestamp (UTC) in standard ISO 8601:2004(E) format YYYY-mm-ddTHH:MM:SSZ | unitless |
| Dataset-specific Instrument Name | Nortek Aquadopp HR-profiler |
| Generic Instrument Name | Acoustic Doppler Current Profiler |
| Dataset-specific Description | current profiler (Nortek Aquadopp HR-profiler). |
| Generic Instrument Description | The ADCP measures water currents with sound, using a principle of sound waves called the Doppler effect. A sound wave has a higher frequency, or pitch, when it moves to you than when it moves away. You hear the Doppler effect in action when a car speeds past with a characteristic building of sound that fades when the car passes. The ADCP works by transmitting "pings" of sound at a constant frequency into the water. (The pings are so highly pitched that humans and even dolphins can't hear them.) As the sound waves travel, they ricochet off particles suspended in the moving water, and reflect back to the instrument. Due to the Doppler effect, sound waves bounced back from a particle moving away from the profiler have a slightly lowered frequency when they return. Particles moving toward the instrument send back higher frequency waves. The difference in frequency between the waves the profiler sends out and the waves it receives is called the Doppler shift. The instrument uses this shift to calculate how fast the particle and the water around it are moving. Sound waves that hit particles far from the profiler take longer to come back than waves that strike close by. By measuring the time it takes for the waves to bounce back and the Doppler shift, the profiler can measure current speed at many different depths with each series of pings. (More from WHOI instruments listing). |
| Dataset-specific Instrument Name | Onset HOBO pressure transducers (PTs) |
| Generic Instrument Name | Pressure Sensor |
| Generic Instrument Description | A pressure sensor is a device used to measure absolute, differential, or gauge pressures. It is used only when detailed instrument documentation is not available. |
SensoryNCE_2014
| Website | |
| Platform | Wassaw_Sound_GA |
| Start Date | 2014-11-03 |
| End Date | 2014-11-06 |
| Description | Wassaw Sound, Georgia |
The role of the sensory environment and predator chemical signal properties in determining NCE strength in cascading interactions on oyster reefs (SensoryNCE)
Extracted from the NSF award abstract:
In this project, the investigators will examine the ability of top blue crab predators to indirectly benefit the abundance of basal oyster prey by reducing the density (consumptive effects, CEs) and suppressing foraging (non-consumptive effects, NCEs) of intermediate mud crab predators. These NCEs are mediated by chemical perception of aversive cues in blue crab urine and produce a behaviorally mediated trophic cascade. Through a series of manipulative experiments, the investigators will examine how the strength of this behaviorally-mediated trophic cascade is modulated and factors that influence perceptive range such as predator diet and intake rate, and the flow environment. The investigators will also determine the chemical identity, concentration and release rate of chemical cues.
Identifying the quantitative and molecular aspects of aversive cues, and linking them to behavioral responses that produce trophic cascades establishes the chemical basis of risk perception by prey and how this translates into cascading ecological effects. The use of perceptive range as a framework for evaluating the effects of both chemistry and environment provides an integrated view of processes affecting chemically-mediated NCEs. The use of a water borne predator-prey signaling system to test ideas on the strength of NCEs should have broad applications.
| Funding Source | Award |
|---|---|
| NSF Division of Ocean Sciences (NSF OCE) |
[ table of contents | back to top ]