Nereus dive geo-referenced megafaunal transect data from the Kermadec Trench during cruise TN309 on RV/Thompson, May 2014
Project
| Contributors | Affiliation | Role |
|---|---|---|
| Shank, Timothy M. | Woods Hole Oceanographic Institution (WHOI) | Principal Investigator |
| Drazen, Jeffrey C. | University of Hawaiʻi at Mānoa (SOEST) | Co-Principal Investigator |
| Yancey, Paul | Whitman College | Co-Principal Investigator |
| Copley, Nancy | Woods Hole Oceanographic Institution (WHOI BCO-DMO) | BCO-DMO Data Manager |
Abstract
This dataset includes geo-referenced megafaunal counts from the Kermadec Trench, April/May 2014. The dives were in the Southwest Pacific, 4000 to ~10,000m from the RV/ Thomas G. Thompson during cruise TN309 (HADES-K), April - May 2014.
The HROV Nereus was used to conduct exploration and characterization (including downloading video seafloor transects) of the Kermadec Trench region in May 2014. Geo-referenced vehicle navigation was conducted using the R/V Thompson’s GPS launch position of the vehicle, the estimated initial on bottom position of the vehicle, the course over ground (determined by the Gyro heading, Doppler Velocity Profiler, and thruster speed).
The HROV transected between 1 and 5 meters off the seafloor, utilizing a down-looking Sony 4k HD camera system, in collaboration with the Advanced Imaging and Visualization Lab at the Woods Hole Oceanographic Institution. Megafauna was enumerated via direct counts from continuous video. Taxonomic identifications were based on comparison with published morphological characters when possible.
Nereus transect video was annotated using CADTV version 11 software and geo-referencing of continuous navigation was conducted via Matlab (2011 Release; MathWorks, Inc.) and Microsoft Excel for Mac 14.7.3.
Summary of HADES-K Nereus dives:
|
Nereus Dive # |
Date |
Mission Depth (m) |
Dive Duration (hrs:min) |
# of Transects |
Bottom Duration (hrs:min) |
|
64 |
4/14/2014 |
4000 |
12:00 |
1 |
6:41 |
|
72 |
5/2/2014 |
6060 |
17:19 |
4 |
9:28 |
|
73 |
5/4/2014 |
7000 |
18:04 |
2 |
8:09 |
|
74 |
5/5/2014 |
8100 |
19:57 |
1 |
10:07 |
|
75 |
5/8/2014 |
9000 |
13:44 |
0 |
2:16 |
|
76 |
5/10/2014 |
10,000 |
11:54 |
2 |
6:28 |
BCO-DMO Processing Notes:- concatenated all the dive data into a single dataset
- added conventional header with dataset name, PI name, version date
- modified parameter names to conform with BCO-DMO naming conventions
- added columns for temp and altitude if not present in dive file
- added date_start, obtained from PI submission, differs somewhat from HadesK_deploylog dataset
- replaced blank cells with zeros to indicate that species were searched for but not found
- changed 'COS' column header to 'COG' in dives 72, 73, 74.
| File |
|---|
macrofauna_georef.csv (Comma Separated Values (.csv), 27.53 MB) MD5:7545bf5b2aef8b92a989e9af5c5ce951 Primary data file for dataset ID 765656 |
| Parameter | Description | Units |
| dive | Nereus dive number | unitless |
| Time2_GMT | time of dive (UTC) formatted as HH:MM:SS | unitless |
| COG | Course Over Ground | degrees |
| SOG | Speed Over Ground | knots |
| Depth | pressure depth | meters |
| Heading | compass vector degrees of the vehicle | degrees |
| Temp | temperature | degrees Celsius |
| Altitude | Doppler Velocity Log (2 beams) | meters |
| Distance | distance traveled; calculated using COS SOG and Heading | meters |
| Distance_x | distance in x direction; calculated using COS SOG and Heading | meters |
| Distance_y | distance in x direction; calculated using COS SOG and Heading | meters |
| Original_x | uncorrected x axis position using layback estimate from ship’s position | decimal degrees |
| Original_y | uncorrected y axis position using layback estimate from ship’s position | decimal degrees |
| New_x | corrected x axis position calculated using distance vector from previous position estimate | decimal degrees |
| New_y | corrected x axis position calculated using distance vector from previous position estimate | decimal degrees |
| Longitude | seafloor position calculated from New x and New y assuming on initial bottom position | decimal degrees |
| Latitude | seafloor position calculated from New x and New y assuming on initial bottom position | decimal degrees |
| Ophiuroid_sp1 | number of Ophiuroid sp1 seen in image | organisms |
| Ophiuroid_sp2 | number of Ophiuroid sp2 seen in image | organisms |
| Anemone_sp1 | number of Anemone sp1 seen in image | organisms |
| Anemone_sp2 | number of Anemone sp2 seen in image | organisms |
| Anemone_sp3 | number of Anemone sp3 seen in image | organisms |
| Anemone_sp4 | number of Anemone sp4 seen in image | organisms |
| Anemone_sp5 | number of Anemone sp5 seen in image | organisms |
| Anemone_sp6 | number of Anemone sp6 seen in image | organisms |
| Anemone_sp7 | number of Anemone sp7 seen in image | organisms |
| Tube_Anemone_sp_1 | number of Tube Anemone sp 1 seen in image | organisms |
| Holothurian_sp1 | number of Holothurian sp1 seen in image | organisms |
| Holothurian_sp2 | number of Holothurian sp2 seen in image | organisms |
| Holothurian_sp3 | number of Holothurian sp3 seen in image | organisms |
| Holothurian_sp4 | number of Holothurian sp4 seen in image | organisms |
| Holothurian_sp5 | number of Holothurian sp5 seen in image | organisms |
| Holothurian_sp6 | number of Holothurian sp6 seen in image | organisms |
| Holothurian_sp7 | number of Holothurian sp7 seen in image | organisms |
| Holothurian_sp8 | number of Holothurian sp8 seen in image | organisms |
| Asteroid_sp1 | number of Asteroid sp1 seen in image | organisms |
| Asteroid_sp2 | number of Asteroid sp2 seen in image | organisms |
| Asteroid_sp3 | number of Asteroid sp3 seen in image | organisms |
| Amphipod_sp1 | number of Amphipod sp1 seen in image | organisms |
| Amphipod_sp2 | number of Amphipod sp2 seen in image | organisms |
| Polychaete_sp1 | number of Polychaete sp1 seen in image | organisms |
| Polychaete_sp2 | number of Polychaete sp2 seen in image | organisms |
| Polychaete_sp3 | number of Polychaete sp3 seen in image | organisms |
| Polychaete_sp4 | number of Polychaete sp4 seen in image | organisms |
| Polychaete_sp5 | number of Polychaete sp5 seen in image | organisms |
| Polychaete_sp6 | number of Polychaete sp6 seen in image | organisms |
| Polychaete_sp7 | number of Polychaete sp7 seen in image | organisms |
| Stalked_Sponge_sp1 | number of Stalked Sponge sp1 seen in image | organisms |
| Crinoid_sp1 | number of Crinoid sp1 seen in image | organisms |
| Crinoid_sp2 | number of Crinoid sp2 seen in image | organisms |
| Shrimp_sp1 | number of Shrimp sp1 seen in image | organisms |
| Isopod_sp1 | number of Isopod sp1 seen in image | organisms |
| Medusazoa_sp1 | number of Medusazoa sp1 seen in image | organisms |
| Medusazoa_sp2 | number of Medusazoa sp2 seen in image | organisms |
| Medusazoa_sp3 | number of Medusazoa sp3 seen in image | organisms |
| Unknown_18_Xeno | number of Unknown 18 Xeno seen in image | organisms |
| Unknown_6_Enteropnuest | number of Unknown 6 Enteropnuest seen in image | organisms |
| unknown_plant_material | number of unknown plant material seen in image | organisms |
| date_start | Date at start of dive (UTC) | unitless |
| Dataset-specific Instrument Name | Sony 4k HD Imaging System with Deep-Sea Power and Light LED lights |
| Generic Instrument Name | Camera |
| Generic Instrument Description | All types of photographic equipment including stills, video, film and digital systems. |
| Dataset-specific Instrument Name | |
| Generic Instrument Name | HROV Nereus |
| Generic Instrument Description | Nereus is an efficient, multi-purpose “hybrid” vehicle that can explore and operate in the crushing pressures of the greatest ocean depths. An unmanned vehicle, Nereus operates in two complementary modes. It can swim freely as an autonomous underwater vehicle (AUV) to survey large areas of the depths, map the seafloor, and give scientists a broad overview. When Nereus locates something interesting, the vehicle’s support team can bring the vehicle back on board the ship and transforms it into a remotely operated vehicle (ROV) tethered to the ship via a micro-thin, fiber-optic cable. Through this tether, Nereus can transmit high-quality, real-time video images and receive commands from skilled pilots on the ship to collect samples or conduct experiments with a manipulator arm.
Technical specifications:
Weight on land: 2,800 kg
Payload capacity: 25 kg
Maximum speed: 3 knots
Batteries: rechargable lithium ion, 15 kilowatt hours in two pressure housings
Thrusters: 2 fore and aft, 2 vertical, 1 lateral (ROV mode) 2 fore and aft, 1 vertical (AUV mode)
Lights: variable output LED array, strobes
Manipulator arm: Kraft TeleRobotics 7-function hydraulic manipulator
Sonar: scanning sonar, forward look and profile, 675 KHz
Sensors: magnetometer, CTD (to measure conductivity, temperature, and depth)
Nereus supports a variety of science operations: Push coring, measuring heat flow, geotechnical and geochemical sensing, rock sampling and drilling, biological sampling, water sampling, high resolution acoustic bathymetry, and optical still and video imagery.
More information is available from the operator site at URL. |
TN309
| Website | |
| Platform | R/V Thomas G. Thompson |
| Start Date | 2014-04-10 |
| End Date | 2014-05-20 |
| Description | Original data are available from the NSF R2R data catalog |
Controls on Hadal Megafaunal Community Structure: a Systematic Examination of Pressure, Food Supply, and Topography (HADES)
Extracted from the NSF award abstract:
Severe technical challenges associated with the extremes of hydrostatic pressure have prevented major advances in hadal ecological studies, and relegated hadal systems to among the most poorly investigated habitats on Earth. Through this project, Hadal Ecosystems Studies (HADES) program, PIs will determine the composition and distribution of hadal species, the role of hadal pressures (piezolyte concentrations, enzyme function under pressure), food supply (distribution of POC with the abundance and biomass of trench organisms, and metabolic rates/energetic demand), and depth/topography (genetic divergence and spatial connectivity of populations) have on impacting deep-ocean community structure. This project will examine these factors using the world's first full-ocean depth hybrid remotely operated vehicle (HROV) in conjunction with the only full-ocean depth imaging lander (Hadal-Lander). This project will provide the first seafloor data and samples in one of the world's best, yet little known trenches- the Kermadec Trench (SW Pacific Ocean). Megafaunal community structure and the relationship between POC and benthic bacterial biomass will be examined as a function of depth and location by systematic high-definition imaging and sediment/faunal sampling transects from abyssal to full trench depths both along and perpendicular to the trench axis. Population genetic approaches will provide levels of genetic divergence and evolutionarily independent lineages to assess the role of depth and topography in trenches and their adjacent abyssal plain in promoting the formation of species. Physiological constraints will be investigated by examining in-situ respiration of selected fauna and tissue concentrations of such protein stabilizers as trimethylamine oxide (TMAO), and the structural adaptations of macromolecules.
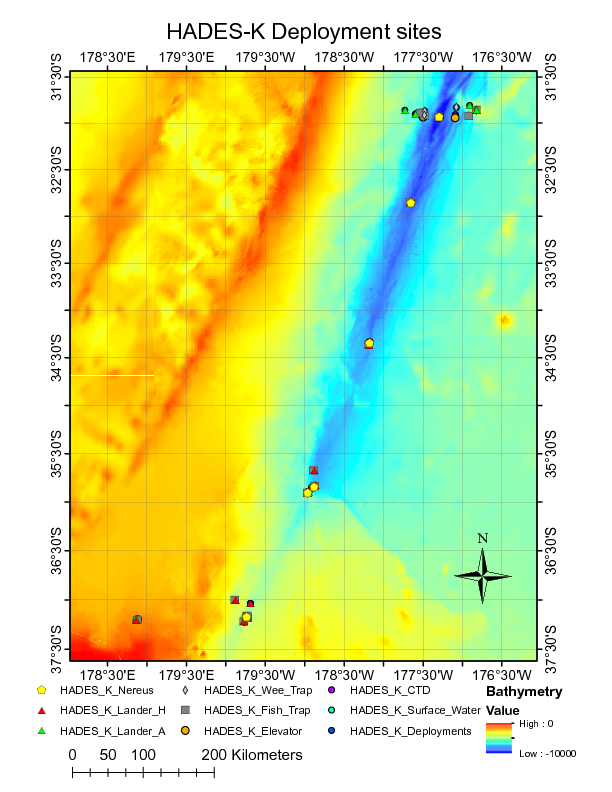
Image of NEREUS Deployment Sites. [click on the image to view a larger version]
| Funding Source | Award |
|---|---|
| NSF Division of Ocean Sciences (NSF OCE) |
[ table of contents | back to top ]